Sự phát triển của công nghệ hóa dần được ứng dụng trong nhiều lĩnh vực, nhất là trong công nghiệp. Do vậy ngày càng có nhiều robot công nghệ được phát minh và ứng dụng trong công nghiệp. Tìm hiểu chi tiết Các loại robot công nghiệp và những tiêu chí phân loại robot công nghiệp qua bài viết sau.
Mục lục
1. Phân loại robot công nghiệp theo không gian làm việc
Để dịch chuyển khâu tác động cuối cùng của robot đến vị trí của đối tượng thao tác được cho trước trong không gian làm việc cần phải có ba bậc chuyển động chuyển dời hay chuyển động định vị (thường dùng khớp tịnh tiến và khớp quay loại 5).
Những robot công nghiệp thực tế thường không sử dụng quá bốn bậc chuyển động chuyển dời (không kể chuyển động kẹp của tay gắp) và thông thường với ba bậc chuyển động định vị là đủ, rất ít khi sử dụng đến bốn bậc chuyển động định vị. Robot được phân loại theo sự phối hợp giữa ba trục chuyển động cơ bản rồi sau đó được bổ sung để mở rộng thêm bậc chuyển động nhằm tăng thêm độ linh hoạt.
Vùng giới hạn tầm hoạt động của robot được gọi là không gian làm việc.
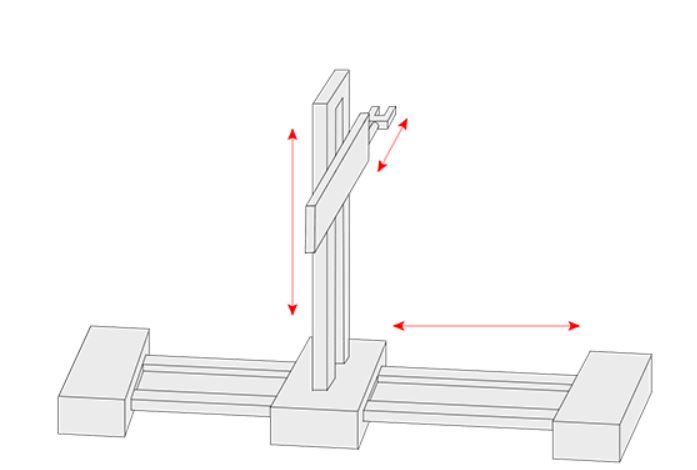
1.1 Robot tọa độ vuông góc
Robot loại này có ba bậc chuyển động cơ bản gồm ba chuyển động tịnh tiến dọc theo ba trục vuông góc. Không gian làm việc của nó có dạng hình hộp chữ nhật. Cấu hình này được sử dụng khi không gian làm việc lớn hoặc khi cần sự chính xác nhất quán được mong đợi từ robot.
1.2 Robot công nghiệp toạ độ trụ
Robot có ba bậc chuyển động cơ bản gồm hai trục chuyển động tịnh tiến và một trục quay.
1.3 Robot toạ độ cầu (spherical robot)
Robot hình cầu là một robot có hai khớp quay và một khớp lăng trụ. Nói cách khác, nó gồm có hai trục quay và một trục tuyến tính. Robot hình cầu có một cánh tay có không gian hoạt động theo tọa độ hình cầu.
1.4 Robot khớp bản lề (articular robot)
Một robot khớp nối (khớp bản lề) là một robot với các khớp quay. Các robot khớp nối có thể bao gồm từ cấu trúc hai khớp đơn giản đến các hệ thống có 10 khớp hoặc nhiều khớp hơn tương tác với nhau. Ba bậc chuyển động cơ bản gồm ba trục quay, cả kiểu robot SCARA.
SCARA là viết tắt của Selective Compliance Assembly Robot Arm hoặc Selective Compliance Articulated Robot Arm. Hầu hết các robot SCARA đều dựa trên cấu trúc nối tiếp, có nghĩa là động cơ đầu tiên phải mang tất cả các động cơ khác. Kiến trúc robot SCARA đôi cánh tay, thì hai động cơ được cố định ở đáy.
2. Robot công nghiệp phân loại theo thế hệ
Theo quá trình phát triển của robot, ta có thể chia ra theo các mức độ sau đây:
2.1 Robot thế hệ đầu tiên
Bao gồm các dạng robot hoạt động lặp lại theo một chu trình không thay đổi (playback robots), theo chương trình định trước. Chương trình ở đây cũng có hai dạng; chương trình “cứng” thì không thay đổi được như điều khiển bằng hệ thống cam và điều khiển với chương trình thì có thể thay đổi theo yêu cầu công nghệ của môi trường sử dụng nhờ các bảng điều khiển (Panel) hoặc máy tính.
Đặc điểm:
- Sử dụng tổ hợp các cơ cấu cam với công tác giới hạn hành trình.
- Điều khiển vòng hở.
- Có thể sử dụng băng từ hoặc băng đục lỗ để đưa chương trình vào bộ điều khiển, tuy nhiên loại này không thay đổi chương trình được.
- Sử dụng phổ biến trong công việc gắp – đặt (pick and place).
2.2 Robot thế hệ thứ hai
Trong trường hợp này robot được trang bị các bộ cảm biến (sensors) cho phép cung cấp tín hiệu phản hồi hỗ trở lại hệ thống điều khiển về trạng thái, vị trí không gian của robot cũng như những thông tin về môi trường bên ngoài như trạng thái, vị trí của đối tượng thao tác, của các máy công nghệ mà robot phối hợp, nhiệt độ của môi trường, v.v… giúp cho bộ điều khiển có thể lựa chọn những thuật toán thích hợp để điều khiển robot thực hiện những thao tác xử lý phù hợp.
Nói cách khác, đây cũng là robot với điều khiển theo chương trình nhưng có thể tự điều chỉnh hoạt động thích ứng với những thay đổi của môi trường thao tác. Dạng robot với trình độ điều khiển này còn được gọi là robot được điều khiển thích nghi cấp thấp. Robot thế hệ này bao gồm các robot sử dụng cảm biến trong điều khiển (sensor – controlled robots) cho phép tạo được những vòng điều khiển kín kiểu servo.
Đặc điểm:
- Điều khiển vòng kín các chuyển động của tay máy.
- Có thể tự ra quyết định lựa chọn chương trình đáp ứng dựa trên tín hiệu phản hồi từ cảm biến nhờ các chương trình đã được cài đặt từ trƣớc.
- Hoạt động của robot có thể lập trình được nhờ các công cụ như bàn phím, pa-nen điều khiển.
2.3 Robot thế hệ thứ ba
Đây là dạng phát triển cao nhất của robot tự cảm nhận.
Các robot ở đây được trang bị những thuật toán xử lý các phản xạ logic thích nghi theo những thông tin và tác động của môi trƣờng lên chúng; nhờ đó robot tự biết phải làm gì để hoàn thành được công việc đã được đặt ra cho chúng.
Hiện nay cũng đã có nhiều công bố về những thành tựu trong lĩnh vực điều khiển này trong các phòng thí nghiệm và được đưa ra thị trường dưới dạng những robot giải trí có hình dạng của các động vật máy. Robot thế hệ này bao gồm các robot được trang bị hệ thống thu nhận hình ảnh trong điều khiển (Vision – controlled robots) cho phép nhìn thấy và nhận dạng các đối tượng thao tác.
Đặc điểm:
- Có những đặc điểm như loại trên và điều khiển hoạt động trên cơ sở xử lý thông tin thu nhận được từ hệ thống thu nhận hình ảnh (Vision systems – Camera).
- Có khả năng nhận dạng ở mức độ thấp như phân biệt các đối tượng có hình dạng và kích thước khá khác biệt nhau.
2.4 Robot công nghiệp thế hệ thứ tư
Bao gồm các robot sử dụng các thuật toán và cơ chế điều khiển thích nghi (adaptively controlled robot) được trang bị bước đầu khả năng lựa chọn các đáp ứng tuân theo một mô hình tính toán xác định trước nhằm tạo ra những ứng xử phù hợp với điều kiện của môi trường thao tác.
Đặc điểm:
- Có những đặc điểm tương tự như thế hệ thứ hai và thứ ba, có khả năng tự động lựa chọn chương trình hoạt động và lập trình lại cho các hoạt động dựa trên các tín hiệu thu nhận được từ cảm biến.
- Bộ điều khiển phải có bộ nhớ tượng đối lớn để giải các bài toán tối ưu với điều kiện biên không được xác định trước. Kết quả của bài toán sẽ là một tập hợp các tín hiệu điều khiển các đáp ứng của robot.
2.5 Robot thế hệ thứ năm
Là tập hợp những robot được trang bị trí tuệ nhân tạo (artificially intelligent robot)
Đặc điểm:
- Robot được trang bị các kỹ thuật của trí tuệ nhân tạo như nhận dạng tiếng nói, hình ảnh, xác định khoảng cách, cảm nhận đối tượng qua tiếp xúc, v.v… để ra quyết định và giải quyết các vấn đề hoặc nhiệm vụ đặt ra cho nó.
- Robot được trang bị mạng Neuron có khả năng tự học.
- Robot được trang bị các thuật toán dạng Neuron Fuzzy/Fuzzy Logic để tự suy nghĩ và ra quyết định cho các ứng xử tượng thích với những tín hiệu nhận được từ môi trường theo những thuật toán tối ưu một hay nhiều mục tiêu đồng thời.
Hiện nay trong lĩnh vực giải trí, nhiều dạng robot thế hệ này đang được phát triển như robot Aibo – chú chó robot của hãng Sony hay robot đi trên hai chân và khiêu vũ được của hãng Honda.
3. Phân loại robot công nghiệp theo bộ điều khiển
3.1 Robot công nghiệp gắp – đặt
Robot này thường nhỏ và sử dụng nguồn dẫn động khí nén.
Bộ điều khiển phổ biến là bộ điều khiển lập trình (PLC) để thực hiện điều khiển vòng hở. Robot hoạt động căn cứ vào các tín hiệu phản hồi từ các tiếp điểm giới hạn hành trình cơ khí đặt trên các trục của tay máy.

3.2 Robot công nghiệp đường dẫn liên tục
Robot loại này sử dụng bộ điều khiển servo thực hiện điều khiển vòng kín. Hệ thống điều khiển liên tục là hệ thống trong đó robot được lập trình theo một đường chính xác. Trong hệ thống điều khiển này, đường dẫn được biểu điễn bằng một loạt các điểm rời rạc gần nhau và được lưu vào bộ nhớ robot, sau đó robot sẽ thực hiện lại chính xác đường dẫn đó.
4. Phân loại robot công nghiệp theo nguồn dẫn động
4.1 Robot công nghiệp dùng nguồn cấp điện
Nguồn điện cấp cho robot thường là DC để điều khiển động cơ DC. Hệ thống dùng nguồn AC cũng được chuyển đổi sang DC.
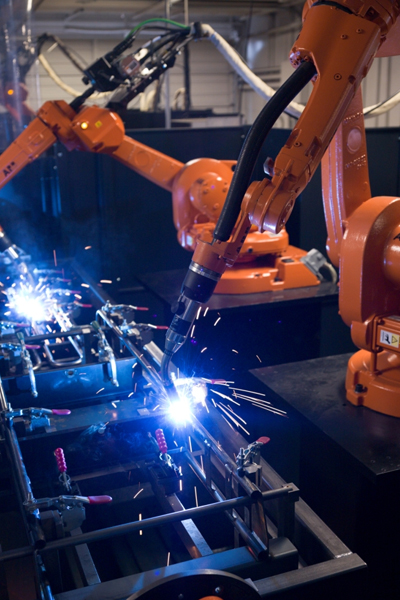
Các động cơ sử dụng thường là động cơ bước, động cơ DC servo, động cơ AC servo. Robot loại này có thiết kế gọn, chạy êm, định vị rất chính xác. Các ứng dụng phổ biến là robot sơn, hàn.
Robot dùng nguồn khí nén Hệ thống cán được trang bị máy nén, bình chứa khí và động cơ kéo máy nén. Robot loại này thường được sử dụng trong các ứng dụng có tải trọng nhỏ có tay máy là các xy-lanh khí nén thực hiện chuyển động thẳng và chuyển động quay. Do khí nén là lưu chất nén được nén robot loại này thường sử dụng trong các thao tác gắp đặt không cần độ chính xác cao.
4.2 Robot công nghiệp dùng nguồn khí nén
Hệ thống cán được trang bị máy nén, bình chứa khí và động cơ kéo máy nén. Robot loại này thường được sử dụng trong các ứng dụng có tải trọng nhỏ có tay máy là các xy-lanh khí nén thực hiện chuyển động thẳng và chuyển động quay. Do khí nén là lƣu chất nén đƣợc nén robot loại này thường sử dụng trong các thao tác gắp đặt không cần độ chính xác cao.
4.3 Robot công nghiệp dùng nguồn thuỷ lực
Nguồn thuỷ lực sử dụng lưu chất không nén được là dầu ép. Hệ thống cần trang bị bơm để tạo áp lực dầu. Tay máy là các xy – lanh thuỷ lực chuyển động thẳng và quay động cơ dầu. robot loại này được sử dụng trong các ứng dụng có tải trọng lớn.
5. Phân loại robot công nghiệp theo tính năng
5.1 Robot di chuyển
Là các robot mà trong đó nhiệm vụ chủ yếu của nó là di chuyển định vị, tìm đường đi tối ưu và vẽ lại bản đồ
5.2 Robot Tay máy (manipulator)
Là các robot hoạt động như những cánh tay con người. Động từ manipulate trong tiếng Anh nghĩa là điều khiển cánh tay. Do đó, một con robot hoạt động như một cánh tay người để cầm nắm, sắp xếp, di chuyển, tương tác với đồ vật được gọi là tay máy (manipulator).
5.3 Robot điều khiển từ xa
Có thể hiểu đó là khi con người tương tác với các vật thông qua một hệ thống trung gian. Một đầu bên kia là một robot, hoặc một thiết bị nào đó, đầu còn lại, con người cằm nắm và điều khiển. Thì cái thiết bị mà con người cắm nắm trực tiếp đó được gọi là Haptics Devices. Trong một hệ thống như vậy. Luôn luôn có hai thành phần, thành phần chủ master = haptics, thành phần tớ slave = robot.
Bên trên là tổng hợp những phân loại của robot công nghiệp. Nhìn chung tất cả các loại robot công nghiệp đều dùng để phục vụ cho con người. Sự phát triển vượt bậc của công nghệ hiện nay có vai trò to lớn cho nguồn lao động hiệu quả, hiện đại trong tương lai.
Nguồn: thuannhat.com.vn/cac-loai-robot-cong-nghiep/